对RRT的理解
请注意,本文编写于 70 天前,最后修改于 70 天前,其中某些信息可能已经过时。
采样 Xrand → 找 Xnear → 朝它生成 Xnew → 线段碰撞检测 → 成功则“加入树与边” → 若 Xnew 距目标 < t 则输出路径
1、初始化:把起点作为根节点加入树;设定边界(采样范围)、步长 S、到达阈值 t、最大迭代次数 N、障碍物表示与碰撞检测函数。
2、循环扩展
- 1) 随机采样 q_rand,是临时点,只用来决定树往哪儿伸一步,它本身不进树
- 2) 最近邻搜索:在树中找离 q_rand 最近的 q_near(即q_near是“已长出的树”的节点)
- 3) 生成新点:从 q_near 朝 q_rand 方向走固定步长 S 得 q_new
- 4) 检查线段 q_near→q_new 是否碰障碍;碰了就丢弃,不碰就把 q_new 加进树,并连一条蓝线
- 5)更新“当前最好节点”:如果 q_new 比历史上任何节点都更接近目标,就把“最好节点”改成 q_new,并把“起点→q_new”的父指针链画成红线
- 6)终止判定: 如果 q_new 距目标小于阈值 t(认为“够近了”),结束并回溯父指针得到路径,红线就是最终路径;否则继续
3、输出路径:从末节点沿父指针回溯到起点得到折线;可再做“捷径平滑”(随机挑两点直连、B样条等)
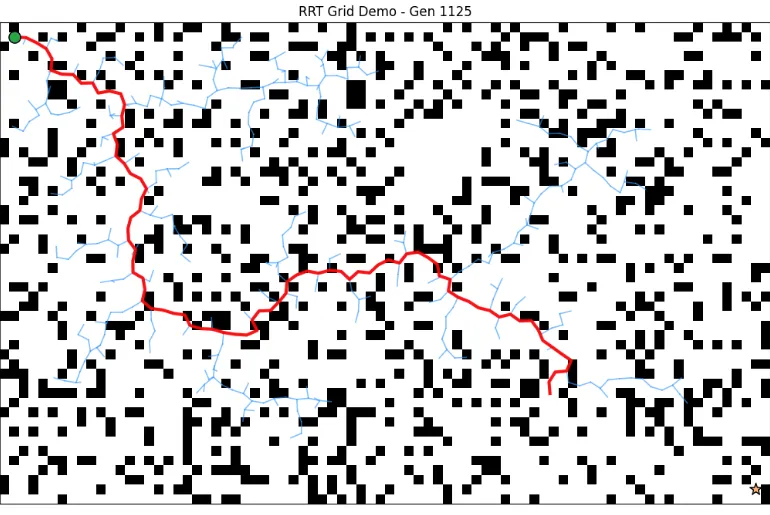
- 红线:从起点到“当前最有希望的那个树节点”的父指针路径。这个“最有希望”在多数演示里指的是“树里离目标最近的节点”。每出现一个更靠近目标的新节点,红线就会改为通向它的那条链。
- 浅蓝线:整棵“搜索树”的所有边。它显示了算法迄今为止尝试过、并且无碰撞的延伸。


当出现了一个距离目标更近的节点,红线就改为通向这个新节点的父链——这会让红线向目标大方向推进
发现蓝色树另一支存在离目标更近的节点,轨迹重新规划:

树的覆盖范围很大了(蓝线)

一旦某次 q_new 落在距离目标 < t 的圆内,红线就定格成最终路径
本文作者:cc
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!