目录
准备工作
创建和构建一个名为xi的catkin工作空间:
bash展开代码mkdir -p /cc_ws/src
cd /cc_ws
catkin_make
catkin_make命令在catkin工作空间中是一个非常方便的工具。在你的工作空间中第一次运行它时,它会在src目录下创建一个CMakeLists.txt的链接。
bash展开代码cd /cc_ws
catkin_make
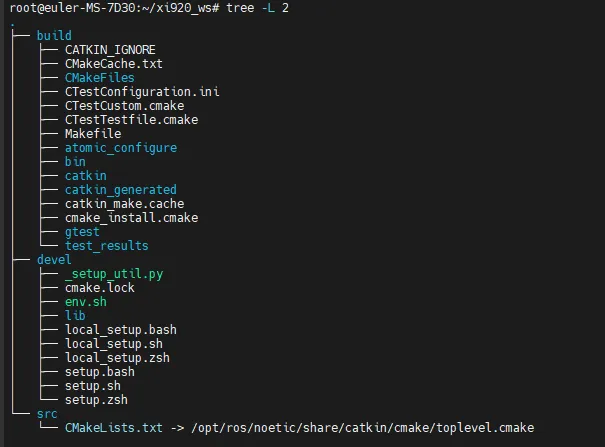
查看结构
 在你的工作空间中第一次运行它时,它会在src目录下创建一个CMakeLists.txt的链接。
在你的工作空间中第一次运行它时,它会在src目录下创建一个CMakeLists.txt的链接。
接下来首先source一下新生成的setup.*sh文件:
bash展开代码source devel/setup.bash
要保证工作区被安装脚本正确覆盖,需确定ROS_PACKAGE_PATH环境变量包含你当前的工作空间目录:
bash展开代码echo $ROS_PACKAGE_PATH
/home/<username>/catkin_ws/src:/opt/ros/<distro>/share

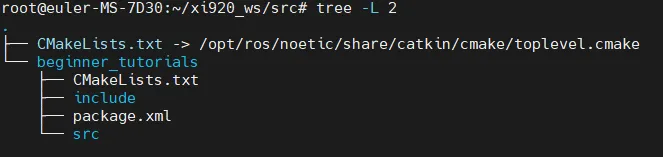
切换到刚才创建的空白xi工作空间中的源文件空间目录:
bash展开代码cd /cc_ws/src
使用catkin_create_pkg命令创建一个名为beginner_tutorials的新软件包,这个软件包依赖于std_msgs、roscpp和rospy:
bash展开代码catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
这将会创建一个名为beginner_tutorials的文件夹,这个文件夹里面包含一个package.xml文件和一个CMakeLists.txt文件,这两个文件都已经部分填写了你在执行catkin_create_pkg命令时提供的信息。

 在catkin工作区中构建软件包:
在catkin工作区中构建软件包:
bash展开代码cd /cc_ws
catkin_make #创建了包要刷新环境

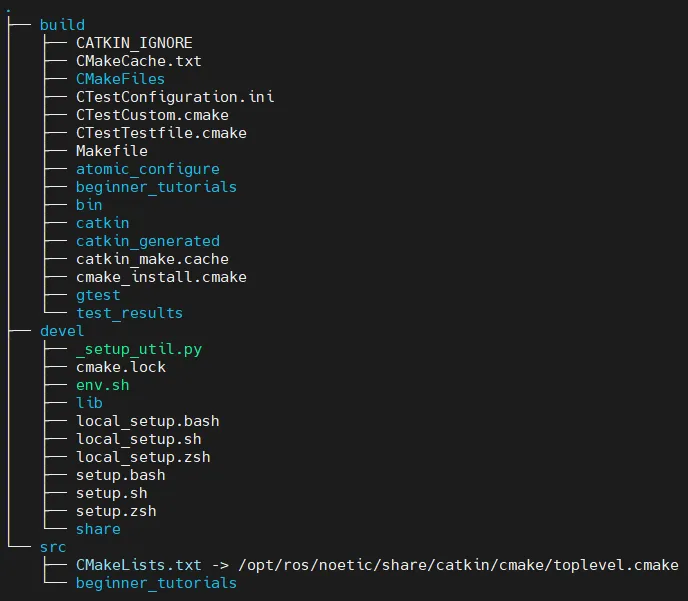 catkin_make构建结果:
构建完成后,会在工作空间内创建三个主要子目录:
catkin_make构建结果:
构建完成后,会在工作空间内创建三个主要子目录:
- build:编译中间文件(CMake缓存、Makefiles等)
- devel:开发环境(重点!)
- src:您的源代码(自己创建的包)
将工作空间添加到ROS环境中:
bash展开代码source /cc_ws/devel/setup.bash #绝对路径
source devel/setup.bash #在当前目录xi920_ws下,因此使用相对路径
验证是否将工作空间路径加入到了ROS环境中:
bash展开代码echo $ROS_PACKAGE_PATH
 如果成功,您会看到类似这样的输出,其中包含您的xi920_ws路径
如果成功,您会看到类似这样的输出,其中包含您的xi920_ws路径
您的环境会将~/catkin_ws/devel加入ROS_PACKAGE_PATH
按照之前的创建ROS软件包教程,应该已经创建好了一个catkin工作空间(xi920_ws)和一个名为beginner_tutorials的catkin软件包。现在切换到catkin工作空间并查看src目录:
bash展开代码$ cd /cc_ws/
$ ls src

看工作空间里的目录
bash展开代码ls

本文作者:cc
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!